
The field of soft robotics represents a paradigm shift, moving away from conventional rigid structures to more flexible designs inspired by living creatures—and this new magnetic paper robot may just be the next big thing.

Soft robotics is a rapidly evolving hot topic for scientists, inspiring novel research and discoveries in materials science and beyond. We've looked at a number of soft robots recently here on ACS Axial, from magnetic millirobots inspired by the walking and grabbing capabilities of insects to comfortable, flexible materials for wearable touch panels.
How these miniature devices are controlled is important—they are often operating at the nano- or micro-scale, and their intended working environments often preclude any sort of battery. Magnetically controllable soft robots are of particular interest because they have unique properties compared with conventional rigid counterparts, and they can be used in diverse applications such as intelligent electronics, microplastic removal,1 biomedical sensing,2 and cargo grasping. However, creating multifunctional soft robots has proven challenging because it requires integrating different materials into a single robot body.
To address this challenge, a team from Gazi University in Türkiye designed and fabricated a soft robotic multifunctional system using conventional paper and elastomeric polymers.3 Using paper in soft robotics applications might seem simplistic at first glance, but it introduces a unique, versatile, and cost-effective way to easily manipulate various systems. Paper is a multifunctional material that is widely used in daily life, and paper-based devices are becoming increasingly popular in biochemical analysis, microelectronics, and other fields.4 Paper-based materials are inexpensive, easy to manufacture, and recyclable. Furthermore, using paper as the backbone material for magnetic polymeric films can bring exciting capabilities to soft actuators, such as exceptional load bearing delivered by traditional paper-folding arts such as origami and the potential for fabricating various three-dimensional architectures.

Read the Full Article
Magnetically Controllable Paper-Based Soft Robots for Colorimetric Detection of Heavy Metal Ions
Kubra Ozkan Hukum, Gorkem Liman, and Gokhan Demirel*
DOI: 10.1021/acsami.4c10502
DOI: 10.1021/acsami.4c10502
The new work, published in ACS Applied Materials & Interfaces, demonstrates a soft robotic system using regular paper and flexible polymers mixed with magnetic particles to detect heavy metal ions in water. The authors constructed these magneto-paper platforms using using raw papers with different weights, silicon resin, and magnetic iron particles. Then, they tested the magnetic responsiveness of the samples by subjecting them to various magnetic strengths. With a mix containing 80% magnetic particles on lightweight paper, the platforms folded easily and allowed the team to create various shapes.
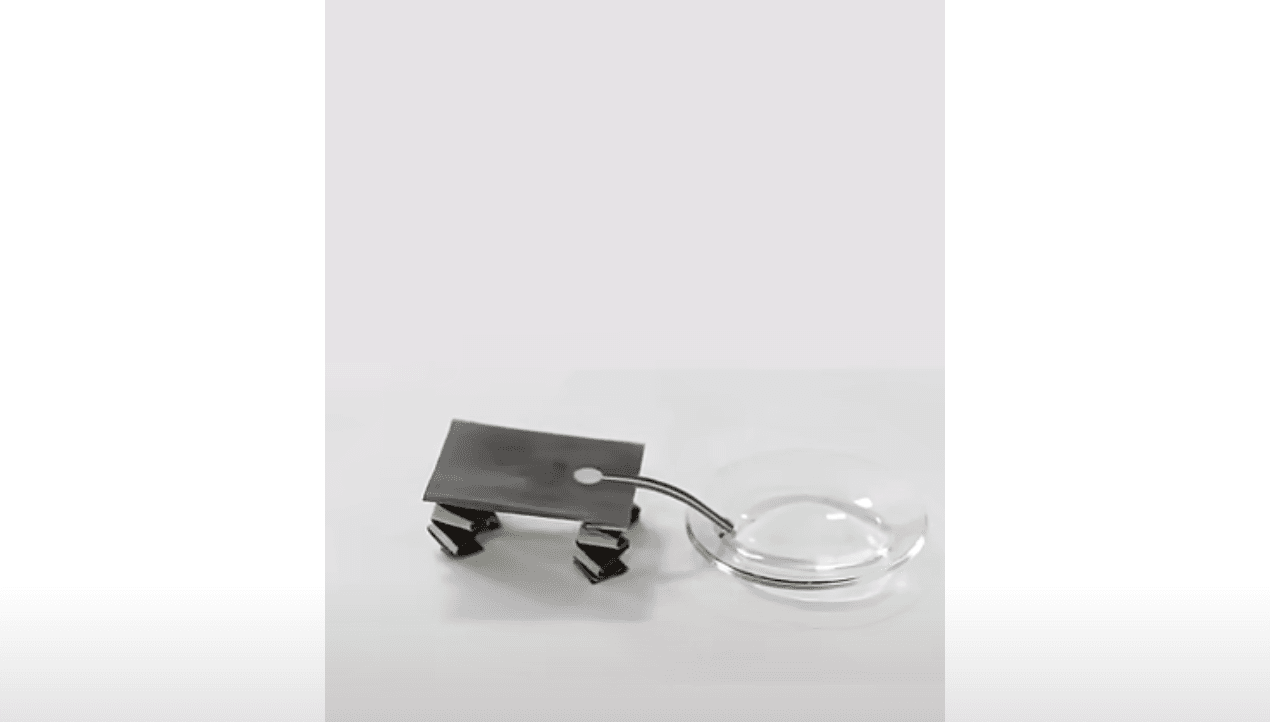
From this starting point, they designed two types of paper robots with zones that change color upon coming into contact with heavy metals. The first robot had a single detection area and a magnetic hose to collect samples (similar to an elephant's trunk). The second robot had one collection area and two detection zones for mercury and iron. As shown in the now-viral Headline Science video below, these little magneto-paper platforms functioned like an accordion, able to undergo rapid contraction and recovery within around three seconds. They also demonstrated exceptional repeatability, retaining approximately 98% of their original length after 500 cycles and highlighting the significant potential of paper for building eco-friendly and sustainable soft robots.
Watch the paper robot in action:
Soft Robots: Explore Related Articles from ACS Journals
Sensing in Soft Robotics
Chidanand Hegde, Jiangtao Su, Joel Ming Rui Tan, Ke He, Xiaodong Chen*, and Shlomo Magdassi*
DOI: 10.1021/acsnano.3c04089
Hydrogels in Soft Robotics: Past, Present, and Future
Antonio López-Díaz, Andrés S. Vázquez, and Ester Vázquez*
DOI: 10.1021/acsnano.3c12200
4D-Printed Bionic Soft Robot with Superior Mechanical Properties and Fast Near-Infrared Light Response
Xuemeng Xia, Jian Meng, Jingjing Qin, Guozheng Yang, Pengyang Xuan, Yunpeng Huang, Wei Fan, Yao Gu, Feili Lai*, and Tianxi Liu*
DOI: 10.1021/acsapm.3c02936
Magnetic Soft Robot for Minimally Invasive Urethral Catheter Biofilm Eradication
Polina I. Baburova, Daniil V. Kladko, Alina Lokteva, Anna Pozhitkova, Viktoriya Rumyantceva, Valeriya Rumyantceva, Ilya V. Pankov, Sergey Taskaev, and Vladimir V. Vinogradov*
DOI: 10.1021/acsnano.2c10127
Enhanced Magnetic Soft Robotics: Integrating Fiber Optics and 3D Printing for Rapid Actuation and Precision Sensing
Wenheng Han, Wei Gao, and Xingzhe Wang*
DOI: 10.1021/acsami.4c04586
Reinforced Gels and Elastomers for Biomedical and Soft Robotics Applications
Dinara Zhalmuratova and Hyun-Joong Chung*
DOI: 10.1021/acsapm.9b01078
Knitting from Nature: Self-Sensing Soft Robotics Enabled by All-in-One Knit Architectures
Mengxin Yang, Fei Sun, Xiaorui Hu, and Fengxin Sun*
DOI: 10.1021/acsami.3c09029
References
- Guo, Q. et al. Hierarchically Structured Hydrogel Actuator for Microplastic Pollutant Detection and Removal. Chem. Mater. 2022, 34, 11, 5165–5175.
- Li, Y. et al. Bio-Inspired Untethered Robot-Sensor Platform for Minimally Invasive Biomedical Sensing. ACS Appl. Mater. Interfaces 2023, 15, 50, 58839–58849.
- Hukum, K.O. et al. Magnetically Controllable Paper-Based Soft Robots for Colorimetric Detection of Heavy Metal Ions. ACS Appl. Mater. Interfaces 2024, 16, 33, 44105–44113.
- Wang, B. et al. Personalized Medical Devices Connect Monitoring and Assistance: Emerging Wearable Soft Robotics. Anal. Chem. 2023, 95, 22, 8395–8410.
